-当“思岚”激光雷达邂逅盲人拐杖
目前,在全球范围内,超过2.5亿人视力受损。对于视力受损的群体来说,独立外出是一项巨大挑战。不仅需要识别障碍物,避开障碍物,还需要根据障碍物的位置信息做出自主寻路和导航判断。
当说到盲人导航的时候,大家的脑子里会立刻浮现“导航犬“或者”拐杖“这样的“交通工具”。但“导航犬”过于昂贵,“拐杖”又过于简单。
最近,斯坦福大学的学生团队结合AI技术,研发出来一款帮助盲人走路的智能拐杖,掀起了拐杖大变革,目前算法也已开源,感兴趣的小伙伴可以搜索了解一下。
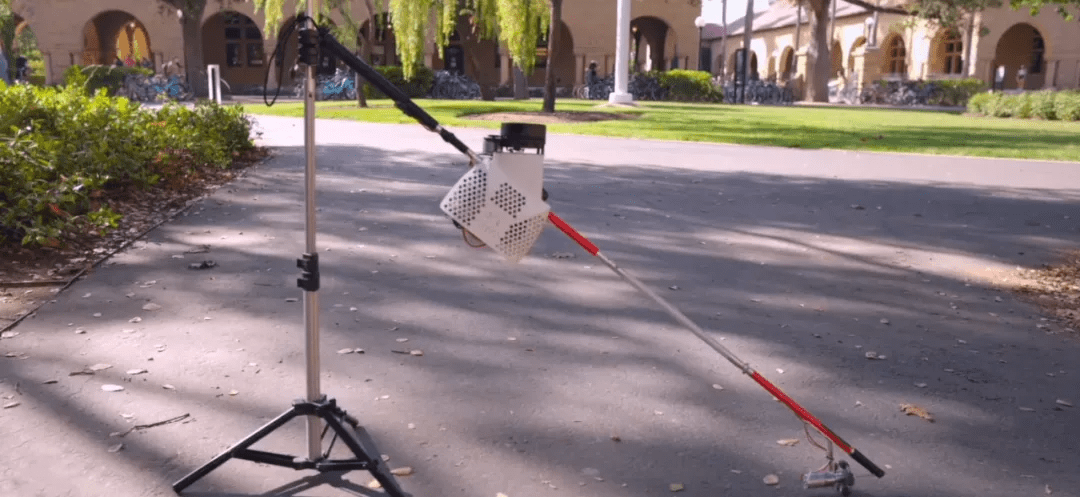
图源:#斯坦福大学学生搞出会带路的盲人拐杖# 视频截图
这次盲人拐杖带来的变革就是把自动驾驶的技术运用到盲人拐杖里,让盲人可以走得更快,能够识别周围的环境,实现自主避障和导航。

在这款盲人拐杖里,斯坦福的学生团队加入了以下传感器,用来协助盲人拐杖的运行:
激光雷达:帮助盲人探测周围物体的形状和环境
GPS:在室外的时候可以知道具体的位置
IMU:知道盲人走路的具体姿势
视觉传感器:结合激光雷达,做SLAM建图
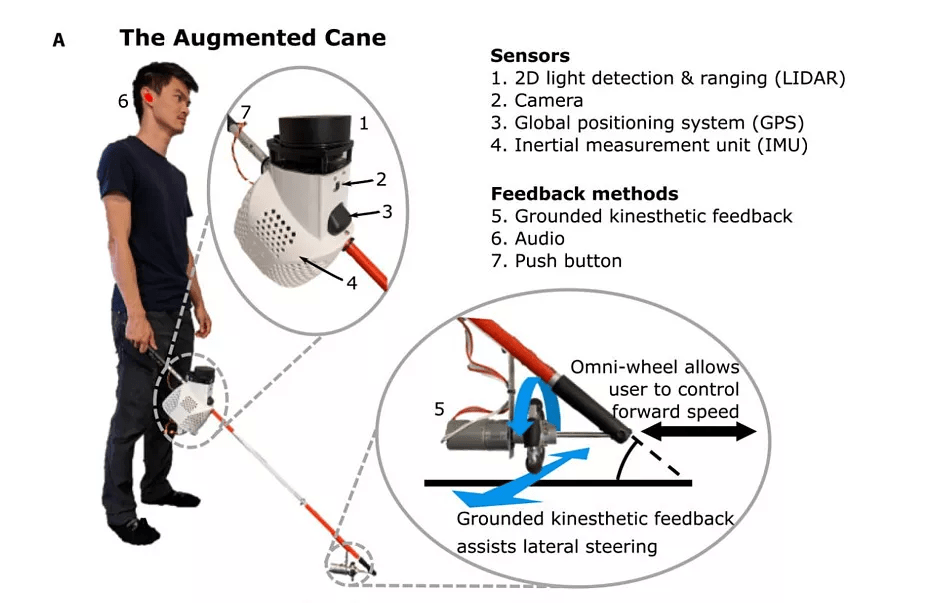
图源:Science Robotics
其中,相信大家对这款激光雷达很眼熟,就是思岚科技的 RPLIDAR A1。
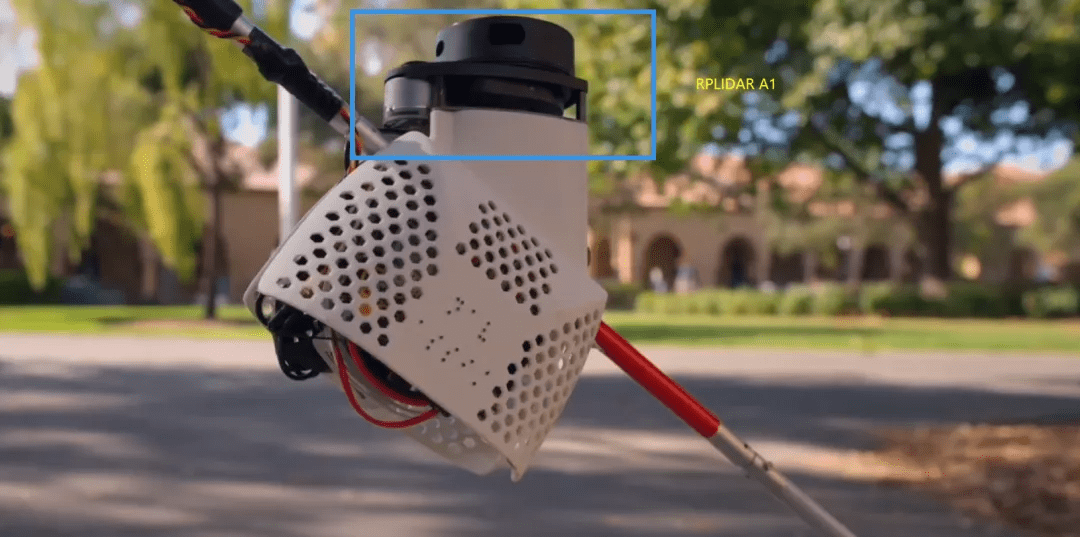
A1的应用,可以用来帮助盲人探测周围物体的形状和周围环境,结合SLAM算法和视觉传感器,进行SLAM避障与导航。
图源:Science Robotics
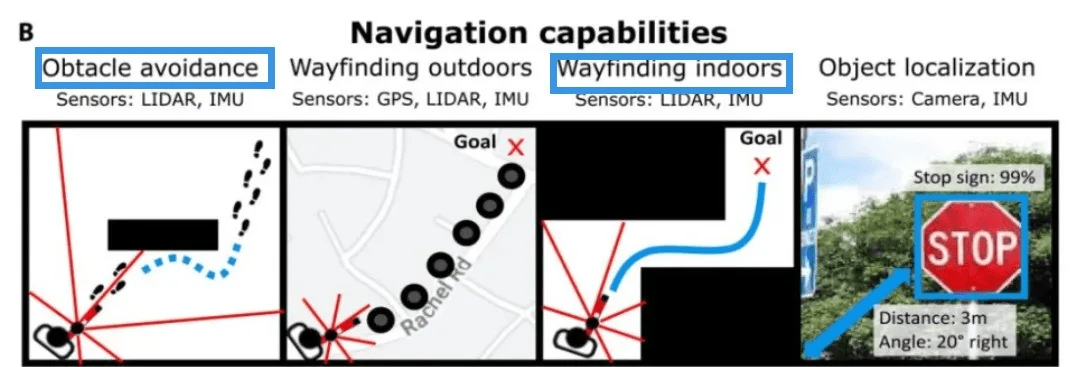
障碍物规避
A1激光雷达通过不断的旋转,发射激光出去,接受激光返回,算出障碍物距离当前的距离,感知到障碍物的存在。
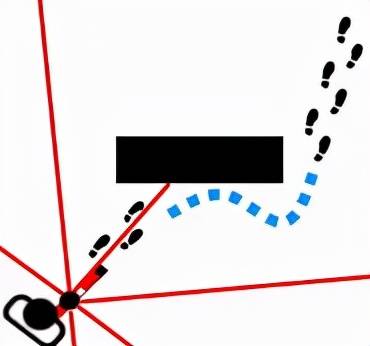
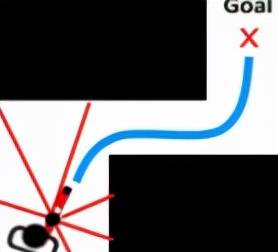
自主导航与寻路
利用激光SLAM可以在感知到障碍物的存在下避开障碍物,自主寻路和导航,实现智能移动。
RPLIDAR A1 作为思岚科技第一款低成本激光雷达传感器,为思岚在行业的布局做了很好的开端。随着市场的不断发展和技术的不断进步,思岚科技的全系列雷达不仅在家用机器人身上,更是在商用移动机器人身上也有着众多应用。推动着智能行业的发展。
原文链接:https://www.sohu.com/a/500689919_447946
涨知识

GPIO
GPIO 是指单片机(微控制器)主板上的一组引脚,这些引脚可以发送或接收电信号,但它们不是为任何特定目的而设计的,这就是为什么它们被称为“通用”IO。
评论:
土壤湿度传感器(YL-69)
此传感器可用于检测土壤湿度,是构建浇花灌溉实验的传感器。

树莓派最新扩展版Raspberry Pi Build HAT兼容乐高电机和传感器
树莓派官网发布消息,宣布与乐高教育(LEGO EDUCATION)合作,发布最新扩展板Raspberry Pi Build HAT,该扩展板能够兼容乐高电机和传感器。

树莓派 Pico MicroPython 开发指南
Raspberry Pi Pico是具有灵活数字接口的低成本,高性能微控制器板。它集成了Raspberry Pi自己的RP2040微控制器芯片,运行速度高达133 MHz的双核Arm Cortex M0 +处理器,嵌入式264KB SRAM和2MB板载闪存以及26个多功能GPIO引脚。对于软件开发,可以使用Raspberry Pi的C / C ++ SDK或MicroPython。
乐高EV3的AI摄像头传感器视觉巡线功能效果评测
今天分享一个为EV3量身定制的机灵熊EV3视觉模块摄像头,这个摄像头模块曾经在2021世界机器人大赛AI探索全国锦标赛中帮助我们队伍获得中学组冠军。
HC-SR04 超声波测距
HC-SR04超声波测距模块可提供2cm-400cm的非接触式距离感测功能,测距精度可达高到3mm;模块包括超声波发射器、接收器和控制电路。
App Inventor 编程实例及指南-第23章 传感器
将你的手机指向天空,谷歌星空地图会显示出你正在观看的星群;倾斜手机,可以控制你的游戏;带着你的手机去散步,一款“面包渣儿”应用将记录下你的途经的路线。所有这些应用之所以能够实现,都是因为你所携带的移动设备装备了高科技的传感器,可以探测到位置、方向以及加速度。
编码器计数原理与电机测速原理
编码器,是一种用来测量机械旋转或位移的传感器。它能够测量机械部件在旋转或直线运动时的位移位置或速度等信息,并将其转换成一系列电信号。

微信分享
