第22讲:Servo Driver for micro:bit控制舵机
本章将介绍Micro:bit通过Servo Driver for micro:bit(舵机驱动板)进行PWM接口扩展,通过I2C即可控制16路舵机。
1.基本介绍
Servo Driver for micro:bit是专为Micro:bit设计的舵机驱动板,通过I2C即可控制16路舵机,每路12位分辨率,适合用于机械臂或六足等机器人舵机驱动。
2.硬件说明

板子可以通过左边绿色端子VIN接电池供电,输入电压范围6V~12V。板载的5V稳压芯片可以最大输出3A电流。也可以通过右边的USB接口power供电,输入电压为5V。 5V电源经过3.3V稳压再给micro:bit供电。
最上面的排针是舵机接口,黑色排针是GND(大部分舵机对应的是褐色线), 红色排针是5V电源,黄色排针是PWM信号线,有0~15个通道,可以同时接16个舵机。注意舵机线不要接反,否则舵机不会转动。
注意:
1.如果只接micro:bit的USB口供电,扩展是没有5V电源的,不能驱动舵机。
2.如果接大功率的舵机可能会出现供电不足的现象,需要接更多的电源。
实际中,Micro:bit采用I2C接口与该模块连接,具体连接如下表所示:
| Micro:bit |
Servo Drive for micro:bit |
| VCC |
VCC |
| GND |
GND |
| SCL |
SCL |
| SDA |
SDA |
3.软件设计
打开makecode,添加软件包,输入链接:
https://github.com/waveshare/pxt-Servo
添加完成后积木栏出现Servo 选项,右边有两个可以控制舵机的积木。

下面这个积木是控制舵机角度的,通道可以选择0-15通道,角度范围是0-180度。

也可以通过下面这个设置脉宽的积木控制舵机,通道可以选择0-15通道,脉宽范围是500-2500。

启动脉宽和角度是以下对应关系:
| 脉宽 |
角度 |
| 500 |
0° |
| 1000 |
45° |
| 1500 |
90° |
| 2000 |
135° |
| 2500 |
180° |
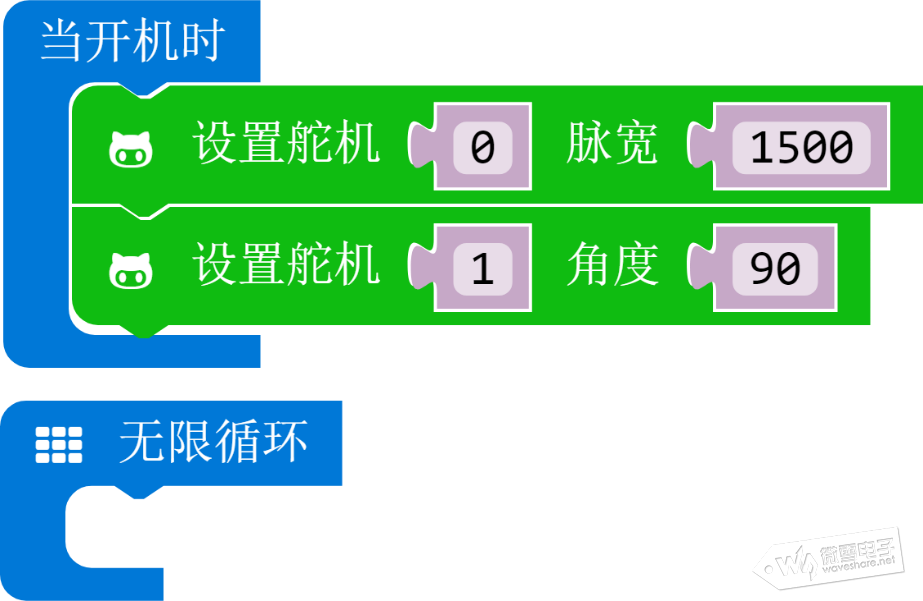
控制舵机仅需以上两个积木即可,直接设置通道,脉宽或者角度即可。以下例程设置0和1通道的舵机为90度,下载程序,并运行后,舵机会转动到90度的位置,如果舵机已经是90度则舵机会不转动,继续保持在90度的位置。
以下例程实现的功能是控制16个通道的舵机在0-180度范围内不断转动。
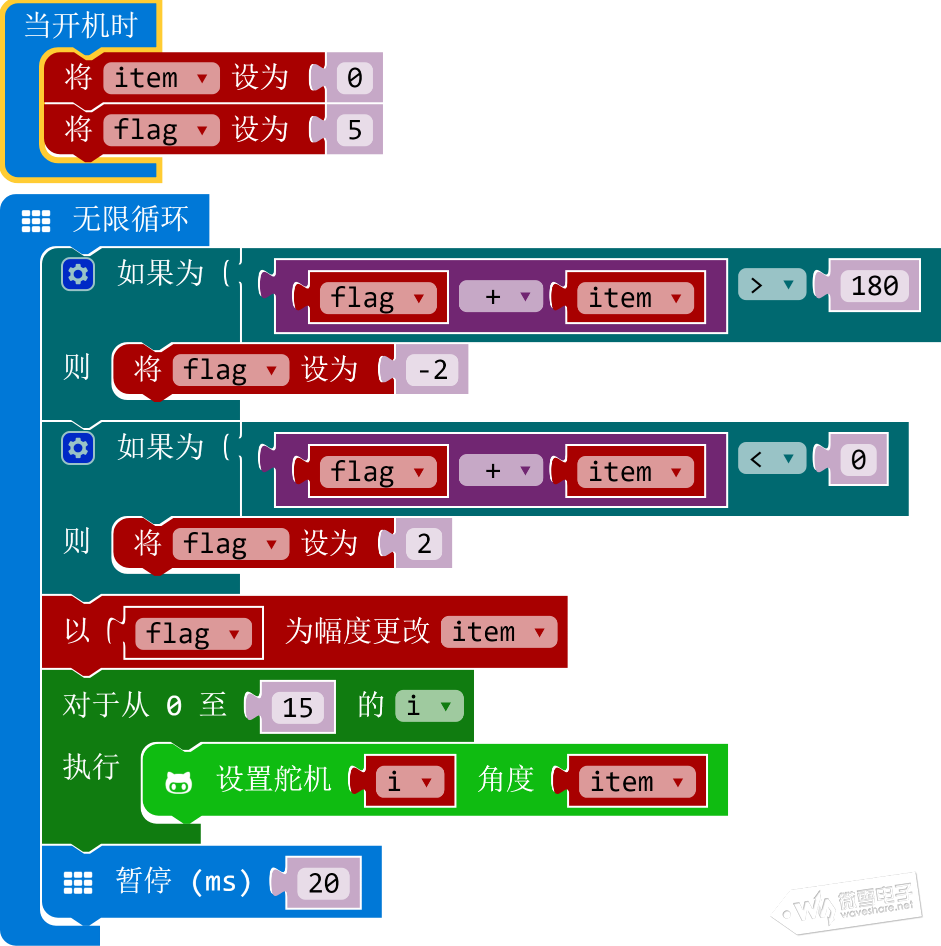
item 变量表示当前的角度。Flag每次转动的步长,正数表示正转,负数表示反转。每20ms转动一次。
程序运行的效果为:0-15通道的舵机从0度转动到180度,然后又从180度转动到0度,不断重复。改变程序中的延时函数可以调整舵机转动速度。
评论:
【ESP32 C++教程】Unit5-2 执行器件之舵机
本节主要讲解舵机驱动类和用按键控制舵机。

基于STEM教育的《人工智能教学 micro:bit智能交通灯》教学案例
渝中区“创新杯”优秀教育教学案例评选活动,是区内教师展示优秀教育教学成果、分享先进教育教学经验的重要品牌活动。为更好地推广获奖成果,搭建学术交流平台,
micro:pet 项目
这个项目为学生提供了一个机会,让他们为他们在 Unplugged 活动中采访的伙伴创建一个 micro:pet。

全球首款桌面级树莓派双轮足机器人问世!哈工大创业团队出品
近日,全球规模最大、最具影响力的众筹平台Kickstarter就发售了这样一种全新形态的桌宠机器人——全球首款桌面级树莓派双轮足机器人XGO-Rider。

通过数据流式处理器使用 micro:bit 和生成代码
本教程介绍如何使用生成代码平台编写一个简单的程序,该程序使用 Microsoft Data Streamer 加载项将实时数据从 BBC micro:bit 发送到 Microsoft Excel。
富有创意的micro:bit机器人和物联网项目合集
本文将向您展示一些关于2023年机器人和物联网的最有趣和创新的micro:bit项目。
micro:bit v1.5 与v2.0的区别
新推出的micro:bit v2.0与 micro:bit v1.5 版本有什么差别呢?本文就带大家从外观和硬件规格等方面了解二者的区别。


Micro:bit硬件介绍与引脚说明
BBC micro:bit是一款手持式可编程微型计算机,可用于从机器人到乐器的各种酷炫创作 - 可能性无穷无尽。
Arduino UNO 舵机与直流电机PWM冲突问题
使用servo库控制舵机与通过9,10引脚对直流电机PWM调速时冲突问题的解决办法。
Micro:bit基础教程
作者:微雪课堂 共25讲Micro:bit是什么?Micro:bit是一款英国广播公司(BBC)推出的,用于青少年编程教育的ARM开发版,接下来,让我们一起认识Micro:bit,学习Micro:bit的基本使用。
课程

微信分享

