

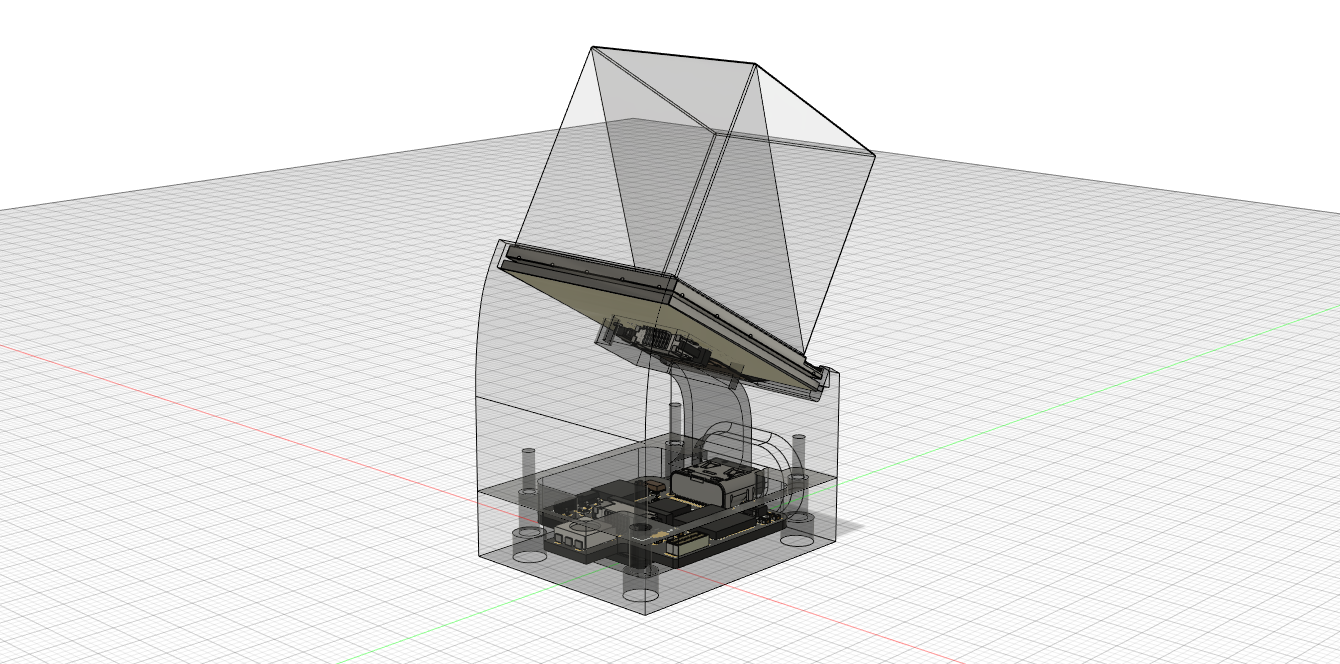
总的来说功能比较多,显示方式也十分炫酷,大家可以基于我的方案继续扩展实现更多功能。本项目的硬件方案是基于ESP32PICO-D4的,一个很实用的SiP芯片,也因此整板面积能做到一个硬币大小;软件方面主要是基于lvgl-GUI库,移植了ST7789 1.3寸240x240分辨率屏幕的显示驱动,同时将MPU6050作为输入设备,通过感应的方式模拟编码器键值。
**暂时没发现有啥需要特别注意的。
**PCB可以直接拿去打样,两层板很便宜,器件BOM的话也都是比较常用的,整板成本在30以内。
玩过Arduino的基本没有上手难度了,把Firmware/Libraries里面的库安装到Arduino库目录(如果你用的是Arduino IDE的话),然后这里需要修改一个官方库文件才能正常使用:
首先肯定得安装ESP32的Arduino支持包(百度有海量教程),然后在安装的支持包的esp32\hardware\esp32\1.0.4\libraries\SPI\src\SPI.cpp文件中,修改以下代码中的MISO为26:
if(sck == -1 && miso == -1 && mosi == -1 && ss == -1) {
_sck = (_spi_num == VSPI) ? SCK : 14;
_miso = (_spi_num == VSPI) ? MISO : 12; // 需要改为26
_mosi = (_spi_num == VSPI) ? MOSI : 13;
_ss = (_spi_num == VSPI) ? SS : 15;
这是因为,硬件上连接屏幕和SD卡分别是用两个硬件SPI,其中HSPI的默认MISO引脚是12,而12在ESP32中是用于上电时设置flash电平的,上电之前上拉会导致芯片无法启动,因此我们将默认的引脚替换为26。
也可以通过设置芯片熔丝的方式解决这个问题,不过那样的操作时一次性的,不建议这么玩。
另外:
由于我赶视频制作,代码都是临时写的非常杂乱有很多dirty code,因此仓库中的是所有驱动调通之后的模板代码,可以自己基于这个框架自由开发。
我后面有空了整理好APP应用代码也会更新出来。
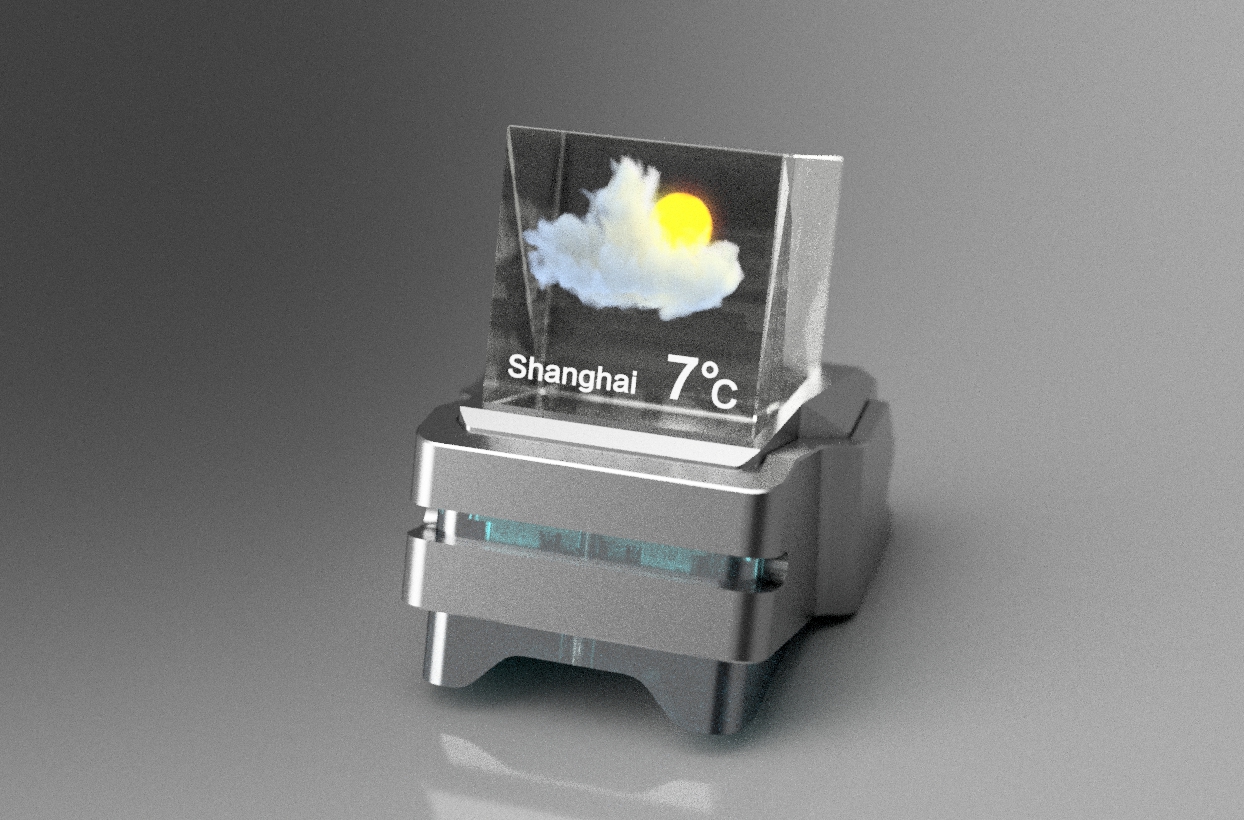
我用的时25.4mm x 25.4mm x 25.4mm的棱镜,淘宝应该可以搜到,单个价格80元左右。
Naive Version:视频中出现的版本,因为周末制作+赶视频时间匆忙所以结构设计得比较简单,以下两个外壳结构都是用这个电路版本↓
Ironman Version:新设计的钢铁侠风格结构件的配套电路,原理图是一样的,下面的结构用这个版本电路(该版本为和朋友合作设计的,后面可能会授权他联名量产)
链拉: https://gitee.com/peng_zhihui/HoloCubic
MimiClaw 是一款基于 ESP32-S3 芯片的超轻量级AI助手,适合嵌入式AI与物联网开发者快速部署本地化AI代理。本系列教程基于MimiClaw的Arduino移植版本进行讲解,小节主要讲解部署和测试。

就像我们用手机打开WiFi功能后可以浏览附近的可用WiFi。要将手机连接到热点,通常需要打开Wi-Fi设置应用程序,列出可用的网络,然后选择所需的热点。然后输入密码(或不输入密码),可以使用ESP32进行相同的操作。
本文本介绍配置飞书机器人为MimiClaw的一个输入/输出端,和添加一个控制WS2812与LED的控制技能。

一块 30 块钱的开发板 + 一个大模型 API,就能做出可以听懂人话的智能硬件。 本文记录完整安装过程和踩坑经验,确保你跟着做就能跑通。
本文将从手绘架构图入手,逐层拆解 MimiClaw 的分层设计、核心模块、数据流转与底层实现,带你解剖这只“智能虾”的技术骨架,看懂在 C 语言加持下,AI 智能体如何以可穿戴设备的形态,在你身边稳稳运行、离线服务、主动响应。
本文介绍如何在不脱离 ArduinoIDE 可视化开发的前提下,通过一个名为 platform.local.txt 的小文件,实现对 ESP32 编译流程的精准控制。
本文将系统分析程序体积增长的五大根源,并提供经过验证的优化方案,帮助减小固件大小。
本文所DIY的语音助手设备端使用的是MicroPython、服务端是Python,对于很多开发者来说MicroPython入门没难度。
本小节使用音频开发框架实现一个音频录制到文件的示例。

I2S协议通过BCLK、LRCLK和DATA三线精准传输音频数据,但时序边沿、帧格式、时钟源等细节常引发噪声或断连。本文详解ESP32的I2S实现,从协议原理到ESP-IDF v5.x代码配置,助你避开常见陷阱,确保音频稳定传输。











专属教研服务系统,助您构建STEM课程体系,打造一站式教学环境。



