软件环境安装
Jetbot 需要与很多周边设备互动,并且使用很多深度学习框架以及 Jupyter 交互界面进行操作,因此需要安装与调试的内容很多。
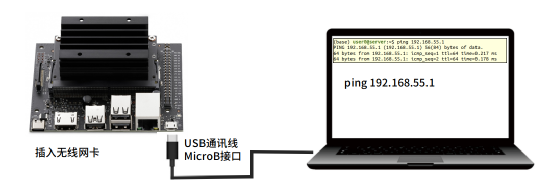
本次 Jetbot 实验全程都在 Jetson Nano 2GB 开发套件上面运行。在组装 Jetbot 教学系统之前,最好先把 Jetbot 系统安装到 Jetson Nano 2GB 上,这样可以先对个别元件进行独立的测试,确认元件能正确工作之后再进行组装的步骤。
否则一旦先组装好再测试的话,如果发现某个元件有问题,或者线路(杜邦线、电源线)没接好,就得拆下来测试后再组装,这个过程非常折磨人,因此建议在组装之前,先个别测试每个元件之后再进行组装,会减少很多麻烦。
Jetbot 需要与很多周边设备互动,并且使用很多深度学习框架以及 Jupyter 交互界面进行操作,因此需要安装与调试的内容很多,主要包括以下部分:


否则一旦先组装好再测试的话,如果发现某个元件有问题,或者线路(杜邦线、电源线)没接好,就得拆下来测试后再组装,这个过程非常折磨人,因此建议在组装之前,先个别测试每个元件之后再进行组装,会减少很多麻烦。
Jetbot 需要与很多周边设备互动,并且使用很多深度学习框架以及 Jupyter 交互界面进行操作,因此需要安装与调试的内容很多,主要包括以下部分:
- jtop 性能监控软件:这个软件对于熟悉 Jetson 设备的人来说是非常熟悉的。
- 摄像头调用库:独立支持 CSI 摄像头的接口
- 深度学习工具:包括 Python 相关库,以及 pytorch、torchvision 库与 TensorFlow 模型仓、torch2trt 工具等
- Jupyter交互环境:包括 Jupyter Lab、Jupyter Clickable Image Widget 以及一些扩展包
- 周边调用库:包括支持 I2C 接口的 python3-smbus 库、创建支持 PiOLED 显示的服务与对 PCA9685+TBB6612 控制板的调用
- 添加 4GB SWAPFILE 与修正一些小错误:
- 其他
为了减少使用者的逐步安装之苦,Jetbot 提供三种安装方式,现在就一一为大家说明,请任选其中一种就可以。
- 完整镜像安装 Jetbot:
这是 Jetbot 一开始推出时所使用的方法,至今还继续沿用。执行步骤如下:
(1)下载 Jetbot 镜像:
根据所使用的机型是 Jetson Nano 或 2GB 版本,选择对应的下载路径,目前最新版本是基于 Jetpack 4.5 的基础上搭建,然后打包成镜像文件提供下载。请到https://jetbot.org/master/software_setup/sd_card.html(下图)点选:
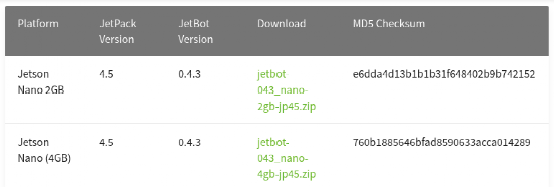
下面也将这两个链接复制一份在这里:
使用Jetson Nano下载(文件大小:13GB)
上一节
Jetbot系统介绍
Jetbot系统介绍
下一节
Jetson的40针引脚
Jetson的40针引脚
评论:
相关文章
乐高42177奔驰G500超深度评测
乐高42177奔驰G500套装共有2891个零件,套装分为20个步骤,拼装时间大约需要6个小时。

Emo:基于树莓派 4B DIY 能笑会动的桌面机器人
Emo 是一款个人伴侣机器人,集时尚与创新于一身。他的诞生离不开最新的树莓派 4 技术和先进的设计。他不仅仅是一款机器人,更是一个活生生的存在。

中国电子学会青少年等级考试介绍
青少年等级考试,英文名称(Youth Level Test)以下简称等级考试。等级考试是中国电子学会服务于国家教育改革和全民科学素质提升的需要, 以提升我国 青少年整体信息素养和创新能力为目标,于2011年起面向全国青少年开展的信息技术能力素质 的评价项目。

乐高反重力悬浮?
这是积木悬浮术??乐高现在已经不归地球管了吗? NO!这是物理,是【张力】! 果然,学好数理化,走遍天下都不怕~

ESP32-S3-BOX
ESP-BOX 是乐鑫科技推出的面向 AIoT、边缘 AI 和 IIoT 应用的开发平台。

Arduino UNO 舵机与直流电机PWM冲突问题
使用servo库控制舵机与通过9,10引脚对直流电机PWM调速时冲突问题的解决办法。
STEM课程学习路径指南
新课标在秋季即将开始执行,其中信息科技课程与STEM教育是紧密相关的,如何更好的展开STEM学习,以培养孩子们的STEM思维呢?本文总结了一个STEM课程的学习路径,供家长参考。

Adafruit GFX图形库的使用
用于Arduino的Adafruit_GFX库为我们所有的LCD和OLED显示器提供了通用语法和图形功能集。这使Arduino程序可以轻松地在显示类型之间进行调整,而不必花太多精力……

在Micropython下使用ESPNow功能进行数据传输
本文讲解如何在Micropython环境下使用ESP32的ESPNow功能进行数据传输。
Jetbot 实战系列
作者:英伟达小助理 共13讲Jetbot 系统上只使用一个 CSI 摄像头,而没有其他任何距离传感设备(sensor),便能实现“避障”、“循路”与“遇障停止”等功能。
课程

推荐文章
微信分享

