7.2 加速度计
micro:bit主板上配备有一个加速度计,可以很好的检测mincro:bit在空间中的位置以及移动方向。
-
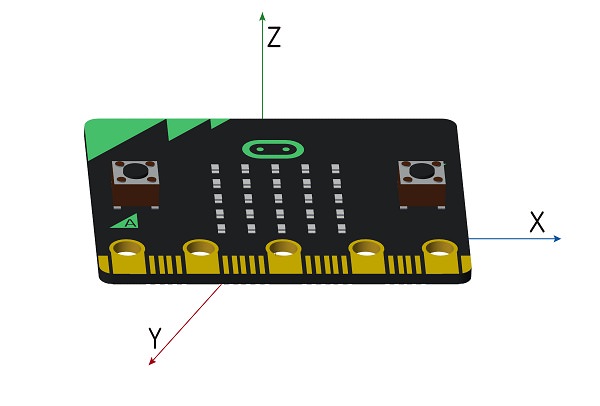
micro:bit主板上配备有一个加速度计,可以测量X,Y,Z轴的运动,横向左右移动为X轴,纵向前后移动为Y轴,高低上下移动为Z轴,可以很好的检测mincro:bit在空间中的位置以及移动方向。每一根轴都有一种方法,返回一个整数或者负数,当读数为0的时候,在该轴方向是水平的。
1. 加速计API
| API | 描述 |
|---|---|
| microbit.accelerometer.get_x() | 读取X轴读数,返回值为一个整数。 |
| microbit.accelerometer.get_y() | 读取Y轴读数,返回值为一个整数。 |
| microbit.accelerometer.get_z() | 读取Z轴读数,返回值为一个整数。 |
| microbit.accelerometer.get_values() | 一次性读取XYZ三个轴的数据,保存为一个元组。 |
| microbit.accelerometer.current_gesture() | 返回当前手势的名称。 |
| microbit.accelerometer.is_gesture(val) | 返回True或者False指示当前手势名val是否处于活动状态。 |
| microbit.accelerometer.was_gesture(val) | 返回True或者False指示当前手势名val自上次调用以来是否处于活动状态。 |
| microbit.accelerometer.get_gesture() | 返回历史手势元组,元组第一位为最新手势,并且清除历史记录。 |
2. 示例:不想站起来
-
根据如上API,编写一段小程序,当micro:bit主板平放时显示一个笑脸,当把主板拿起来显示一个难过脸。它只想躺着。
from microbit import *
while True:
gesture = accelerometer.current_gesture()
if gesture == "face up":
display.show(Image.HAPPY)
else:
display.show(Image.SAD)
下一节
7.3 指南针
7.3 指南针
评论:
相关文章
基于STEM教育的《人工智能教学 micro:bit智能交通灯》教学案例
渝中区“创新杯”优秀教育教学案例评选活动,是区内教师展示优秀教育教学成果、分享先进教育教学经验的重要品牌活动。为更好地推广获奖成果,搭建学术交流平台,
micro:pet 项目
这个项目为学生提供了一个机会,让他们为他们在 Unplugged 活动中采访的伙伴创建一个 micro:pet。

全球首款桌面级树莓派双轮足机器人问世!哈工大创业团队出品
近日,全球规模最大、最具影响力的众筹平台Kickstarter就发售了这样一种全新形态的桌宠机器人——全球首款桌面级树莓派双轮足机器人XGO-Rider。

通过数据流式处理器使用 micro:bit 和生成代码
本教程介绍如何使用生成代码平台编写一个简单的程序,该程序使用 Microsoft Data Streamer 加载项将实时数据从 BBC micro:bit 发送到 Microsoft Excel。
富有创意的micro:bit机器人和物联网项目合集
本文将向您展示一些关于2023年机器人和物联网的最有趣和创新的micro:bit项目。
课程
推荐文章
微信分享
