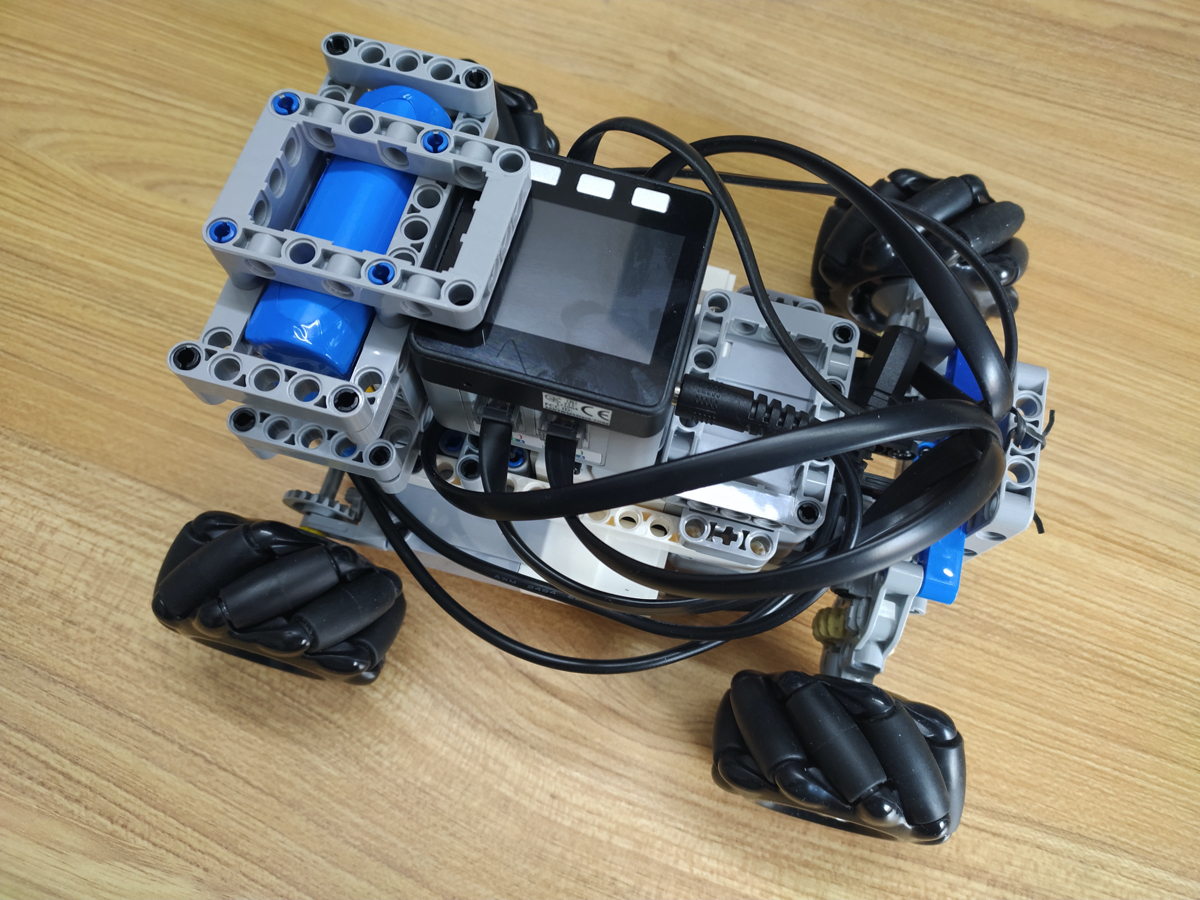
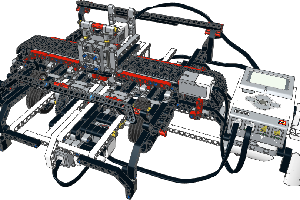
上方视图
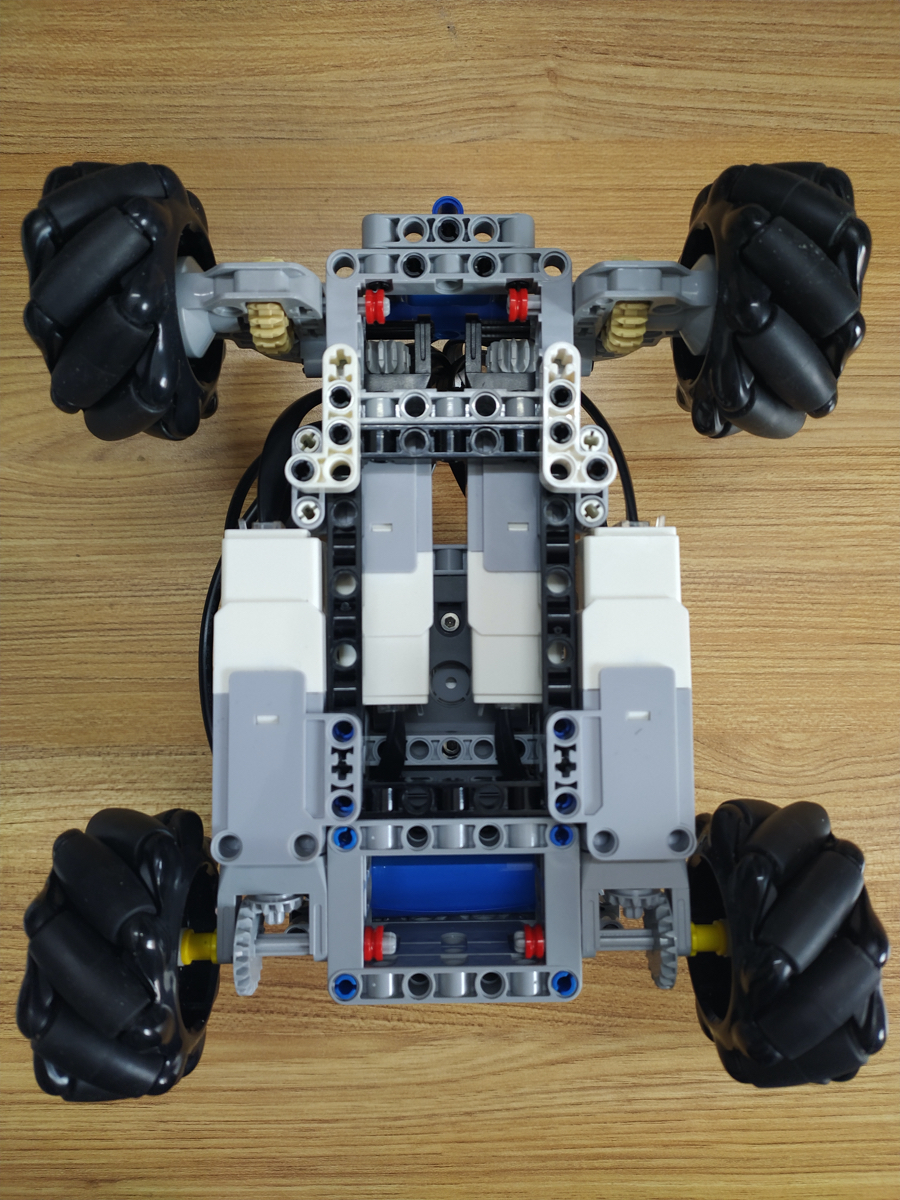
底部视图
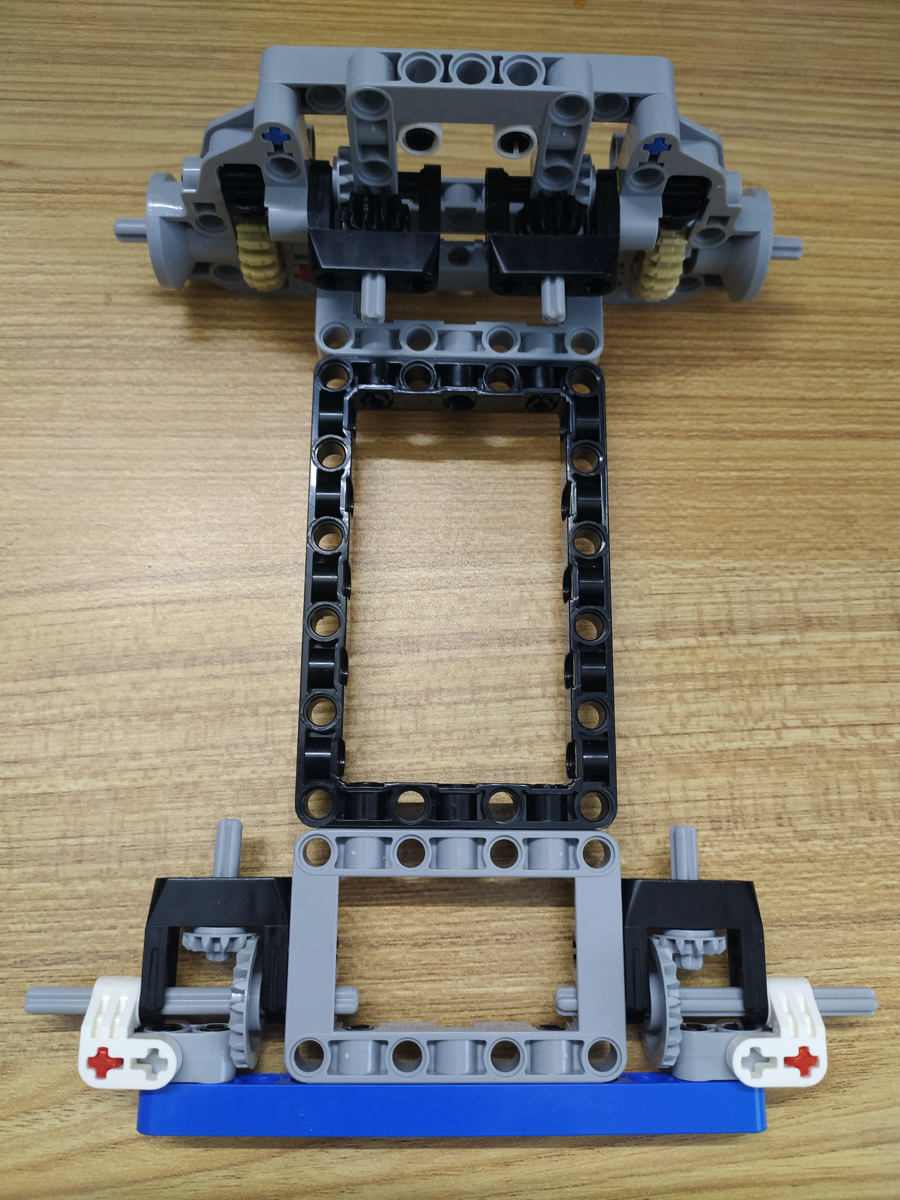
底盘
清单
| 名称 | 数量 | 购买 |
| 乐高科技零件 | 若干 | |
| M5 Core主机 | 1 | |
| M5 BaseX底座模块 | 1 | |
| 兼容EV3中号马达 | 4 | |
| 麦克纳姆轮 | 4(一组) | |
| 12V 锂电池 | 1 | |
麦克纳姆轮的移动方式是基于一个有许多位于机轮周边的轮轴的中心轮的原理上,这些成角度的周边轮轴把一部分的机轮转向力转化到一个机轮法向力上面。








专属教研服务系统,助您构建STEM课程体系,打造一站式教学环境。