 EV3机器人
EV3机器人颜色分拣机
此示例项目使颜色分选器使用颜色传感器扫描彩色 Technic 光束。
一一扫描彩色光束并将它们添加到托盘中。哔哔声确认它已注册颜色。当托盘已满或按下中心按钮时,机器人将开始按颜色分配 Technic 积木。
拼搭说明
在本站查找核心系列模型的所有构建说明。
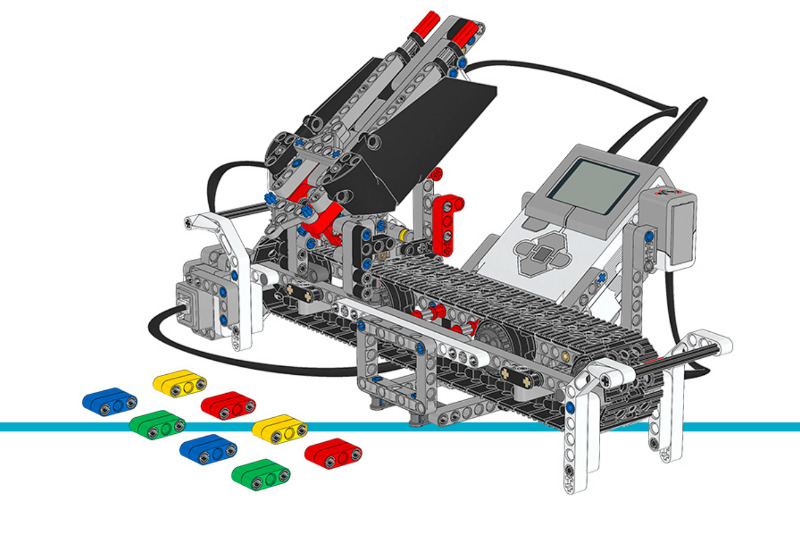
图 27 色选机
示例程序
#!/usr/bin/env pybricks-micropython
"""
Example LEGO® MINDSTORMS® EV3 Color Sorter Program
--------------------------------------------------
This program requires LEGO® EV3 MicroPython v2.0.
Download: https://education.lego.com/en-us/support/mindstorms-ev3/python-for-ev3
Building instructions can be found at:
https://education.lego.com/en-us/support/mindstorms-ev3/building-instructions#building-core
"""
from pybricks.hubs import EV3Brick
from pybricks.ev3devices import Motor, TouchSensor, ColorSensor
from pybricks.parameters import Port, Button, Color, ImageFile, SoundFile
from pybricks.tools import wait
# The colored objects are either red, green, blue, or yellow.
POSSIBLE_COLORS = [Color.RED, Color.GREEN, Color.BLUE, Color.YELLOW]
# Initialize the EV3 brick.
ev3 = EV3Brick()
# Initialize the motors that drive the conveyor belt and eject the objects.
belt_motor = Motor(Port.D)
feed_motor = Motor(Port.A)
# Initialize the Touch Sensor. It is used to detect when the belt motor has
# moved the sorter module all the way to the left.
touch_sensor = TouchSensor(Port.S1)
# Initialize the Color Sensor. It is used to detect the color of the objects.
color_sensor = ColorSensor(Port.S3)
# This is the main loop. It waits for you to scan and insert 8 colored objects.
# Then it sorts them by color. Then the process starts over and you can scan
# and insert the next set of colored objects.
while True:
# Get the feed motor in the correct starting position.
# This is done by running the motor forward until it stalls. This
# means that it cannot move any further. From this end point, the motor
# rotates backward by 180 degrees. Then it is in the starting position.
feed_motor.run_until_stalled(120, duty_limit=50)
feed_motor.run_angle(450, -200)
# Get the conveyor belt motor in the correct starting position.
# This is done by first running the belt motor backward until the
# touch sensor becomes pressed. Then the motor stops, and the the angle is
# reset to zero. This means that when it rotates backward to zero later
# on, it returns to this starting position.
belt_motor.run(-500)
while not touch_sensor.pressed():
pass
belt_motor.stop()
wait(1000)
belt_motor.reset_angle(0)
# When we scan the objects, we store all the color numbers in a list.
# We start with an empty list. It will grow as we add colors to it.
color_list = []
# This loop scans the colors of the objects. It repeats until 8 objects
# are scanned and placed in the chute. This is done by repeating the loop
# while the length of the list is still less than 8.
while len(color_list) < 8:
# Show an arrow that points to the color sensor.
ev3.screen.load_image(ImageFile.RIGHT)
# Show how many colored objects we have already scanned.
ev3.screen.print(len(color_list))
# Wait for the center button to be pressed or a color to be scanned.
while True:
# Store True if the center button is pressed or False if not.
pressed = Button.CENTER in ev3.buttons.pressed()
# Store the color measured by the Color Sensor.
color = color_sensor.color()
# If the center button is pressed or a color is detected,
# break out of the loop.
if pressed or color in POSSIBLE_COLORS:
break
if pressed:
# If the button was pressed, end the loop early. We will no longer
# wait for any remaining objects to be scanned and added to the
# chute.
break
# Otherwise, a color was scanned. So we add (append) it to the list.
ev3.speaker.beep(1000, 100)
color_list.append(color)
# We don't want to register the same color once more if we're still
# looking at the same object. So before we continue, we wait until the
# sensor no longer sees the object.
while color_sensor.color() in POSSIBLE_COLORS:
pass
ev3.speaker.beep(2000, 100)
# Show an arrow pointing to the center button, to ask if we are done.
ev3.screen.load_image(ImageFile.BACKWARD)
wait(2000)
# Play a sound and show an image to indicate that we are done scanning.
ev3.speaker.play_file(SoundFile.READY)
ev3.screen.load_image(ImageFile.EV3)
# Now sort the bricks according the list of colors that we stored.
# We do this by going over each color in the list in a loop.
for color in color_list:
# Wait for one second between each sorting action.
wait(1000)
# Run the conveyor belt motor to the right position based on the color.
if color == Color.BLUE:
ev3.speaker.say('blue')
belt_motor.run_target(500, 10)
elif color == Color.GREEN:
ev3.speaker.say('green')
belt_motor.run_target(500, 132)
elif color == Color.YELLOW:
ev3.speaker.say('yellow')
belt_motor.run_target(500, 360)
elif color == Color.RED:
ev3.speaker.say('red')
belt_motor.run_target(500, 530)
# Now that the conveyor belt is in the correct position, eject the
# colored object.
feed_motor.run_angle(1500, 180)
feed_motor.run_angle(1500, -180)


